選擇自動駕駛DNN訓練數據 的三種常見方法:第一,隨機采樣以均勻的間隔從數據池中提取幀,捕獲最常見 的場景,但可能會遺漏罕見的模式。第二,基于元數據的采樣使用基本標簽(例 如,雨水,夜晚)來選擇數據,從而很容易找到常見的困難情況,但是卻丟失了 不容易分類的獨特幀,例如拖拉機拖車或踩著高蹺的人。第三,手動管理將元數 據標簽與人工注釋者的可視化瀏覽結合使用,這是一個耗時的任務,容易出錯且 難以擴展。通過主動學習,可以在選擇有價值的數據點時自動執行選擇過程,可 以避免傳統方法的缺陷。
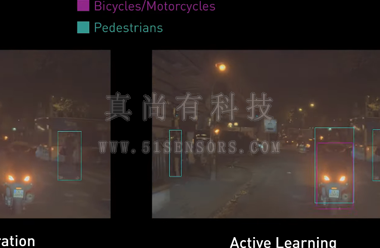
真尚有的主動學習夜間行人識別方 案是一種用于機器學習的訓練數據篩選方法,它可以自動找到這些多樣化的數 據。相較于人工操作,它只需花費小部分時間即可構建更好的數據集。它采用訓 練有素的模型來處理收集來的數據,并對無法識別的圖像進行標記從而發揮作 用。這些圖像中的行人隨后會由人工標記,然后將它們添加到訓練數據中。這 可以提高模型在惡劣條件下感知物體等情況下的準確性,自動駕駛過程中會大大 提高駕駛的安全程度。
真尚有科技提供各種不同領域不同 技術測量檢測方案,我們不僅僅提供各種技術方面的支持,基于我們在行業內超 過15年的積累,協助客戶一起把原始需求迭代為完整方案,最終服務您的方案 藍圖反而是我們更注重的地方。我們始終相信成交靠運氣,不管您是否從我們這 里采購,我們都非常樂意為您服務。
優點:內徑測量儀精密輪廓檢測系統微觀型面測量系統靜態形變測量系統精密在線測厚系統振動測量系統無人警衛船光伏清潔機器人智能垃圾壓實機智能機器人自穩定無人機起落平臺空氣質量檢測儀橋梁結構健康檢測系統其他檢測系統
焊縫分析軟件3D數據處理軟件工業物聯網平臺電渦流軟件預測分析軟件AI軟件計算機視覺平臺數據平臺解決方案服務免代碼軟件集成平臺定制軟件
測速測長_測距傳感器 | 測距儀皮米級電容位移傳感器線激光輪廓掃描儀 | 線掃激光傳感器激光位移傳感器線性位置傳感器光譜共焦傳感器Kaman傳感器系統干涉儀測徑儀 | 測微計 | 激光幕簾千分尺傳感器納米平臺光柵傳感器地下探測儀光纖傳感器太赫茲傳感器液位測量傳感器傾角 | 加速度測量傳感器3D掃描傳感器視覺相機 | 3D相機水下測量儀磁耦合線性執行器磁場傳感器雷達傳感器石墨烯霍爾效應傳感器卷材位置傳感器振動測量傳感器結構檢測傳感器監控電渦流傳感器水聽器校準器無線光學通訊傳感器網關納米級電渦流傳感器其它檢測設備
0755-26528100
0755-26528011
18145802139(微信同號)





